本篇目录:
- 1、abb工业机器人画八卦程序怎么编
- 2、abb机器人程序弹框如何设置
- 3、ABB120机器人仿真平台建立主要包含哪些步骤?
- 4、分析ABB焊接程序编程步骤和需要注意的重点
- 5、abb机器人smart组件可以在从布局后建立吗?
- 6、abbrobotstudio6.08创建系统布局灰色
abb工业机器人画八卦程序怎么编
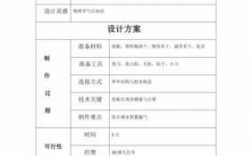
打开Robotstudio软件,运行虚拟示教器,打开示教器的虚拟程序编辑器建立第一个程序。如图回到Robotstudio界面开始编辑离线程序。编写第一个程序如图。
为了完成这个任务,在RobotWare中,我们可以通过点击“新建程序”按钮来创建一个新程序。
-图1")
离线编程程序通过支持软件的解释或编译产生目标程序代码,最后生成机器人路径规划数据。示教编程 示教编程是一项成熟的技术,它是目前大多数工业机器人的编程方式。采用这种方法,程序编制是在机器人现场进行的。
相应的动作程序。。选用参变量[\MaxTime] 与参变量[\TimeFlag],等待超过最长时间后,无论是否满足等待的状态,机器人将自动执行下一句指令。
示教编程 示教器是进行机器人的手动操纵、程序编写、参数配置及监控用的手持装置,也是最常打交道的机器人控制装置。ABB机器人的示教器,如图所示。
abb机器人程序弹框如何设置
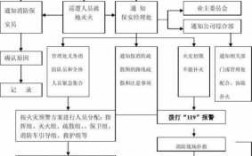
首先打开电脑,并点击主页面上的abb机器人程序编辑器。其次进入主页面,并点击右上角的设置。最后点击标签,点击设置即可。
-图2")
单击屏幕左上角“ABB”弹出界面主菜单界面,单击“手动操纵”按钮打开手动操作界面观测。按下“ ”键切换坐标系到关节坐标系“1-3轴”模式或“4-6轴”模式。
进入abb机器人中你的空间菜单,点击自定义。点击模块管理按钮后,会弹出对话框。在你想要显出来的模块上打对号即可,重启之后隐藏的模块就能显示出来。
打开ABB机器人控制台,点击“系统”菜单,在弹出的菜单中选择“复位”;在弹出的“复位”对话框中,选择“复位IO”,然后点击“确定”;等待机器人完成IO复位,完成后,点击“确定”按钮,关闭“复位”对话框。
ABB120机器人仿真平台建立主要包含哪些步骤?
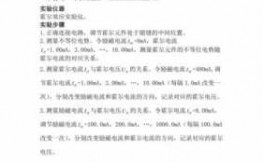
双击桌面ROBOTSTUDIO 15图标,如下图所示。点击左侧选项栏,选择授权。然后选择激活向导,选择如下:点击创建文件,出现如下界面。
-图3")
操作步骤如下:导入机器人。在“基本”功能选项卡的“ABB模型库”中,提供了几乎所有的机器人产品模型,作为仿真所用。单击选择其中型号为IRB120的机器人,确定好版本,点击确定即可。
收集机器人参数和规格:首先,需要收集工业机器人的各项参数和规格,包括机械结构、电气参数、传感器配置等。这些信息将为建模提供基础。
分析ABB焊接程序编程步骤和需要注意的重点
1、包括:司服电机/步进电机转动和电焊机通断电。
2、运行程序:运行程序,机器人将按照你设置的摆动频率执行弧焊任务。需要注意的是,确保按照ABB机器人的规范和安全要求来执行弧焊任务,以确保操作的安全性和质量。
3、ABB编程在程序中新建增加增加新的定义一个变量就可以了。新建例行程序 2)设置名称,点击参数,设置输入参数 3)添加参数,注意右边的数据类型即为该参数数据类型,此处举例输入为2个 4)点击确定。
abb机器人smart组件可以在从布局后建立吗?
在smart组件编辑器中,由以下4种选项卡组成: Design Tab(设计选项卡):该选项卡用于设计和布局组件。在此选项卡中,可以添加、删除、调整和设置组件的各种属性和样式。
ABB机器人自身的离线仿真软件robotstudio ,在加载完机器人和从布局后,就报错:无法建立系统,ProductInstallationFailedException。
点击设置就能调出布局。布局就相当于你拍大头贴时候使用的相框,你可以在布局上画图写字,然后就形成了一个特定格式的文件,以后你就可以直接调用它了。
首先在abb菜单中,点击程序编辑器。其次点击任务与程序,点击文件 。最后即可删除布局,abb是全球领先的工业机器人供应商,提供机器人产品,模块化制造单元及服务。
建立一个简单的搬运工作站需要至少建立以下几个程序: 主程序:控制机器人执行整个工作站的任务,包括搬运物品、放置物品等。 运动程序:控制机器人的运动轨迹,保证机器人能够准确地搬运物品。
到一个支点。abb机器人创建斜面坐标系在斜面上找到一个支点,作为坐标原点。以该支点为参考,建立工件坐标。
abbrobotstudio6.08创建系统布局灰色
1、参数设置故障引起的。robotstudio是abb机器人的离线仿真调试软件,一般目标点参数配置出现灰色的情况,是参数设置故障引起的,需要进行更改后,再使用。灰色是无彩色,即没有色相和纯度,只有明度。
2、RobotStudio是优秀的计算机仿真软件。为帮助提高生产率,降低购买与实施机器人解决方案的总成本,ABB开发了一个适用于机器人寿命周期各个阶段的软件产品家族。
3、在RobotStudio08中,布局位于主界面左侧的框架中。您可以在框架中创建、编辑和管理机器人系统。布局包含三个窗格:文件管理器、组织器和属性/选项。
4、打开机器人仿真软件RobotStudio,点击文件,新建,选择空工作站解决方案,点击创建。选择ABB模型库,在里面导入自己需要的机器人,这里采用1410。从导入模型库的设备选项中添加工具,这里选择添加工具MyTool。
5、abbrobotstudio无法加载布局的原因是系统任务栏被破坏,解决如下。选开始里的运行,输入Regedit后回车,然后在注册表编辑器中依次展开。展开[HKEYCURRENTUSER,Software,Microsoft,Windows,CurrentVersion,Explorer]分支。
6、第一种方案最简单,就是新建一个英文名称的账户,将ABB RobotStudio安装在这个新建的英文账户中,使用的时候切换账户即可。如果你不想使用第二个账户,还有第二种方案,但是比较麻烦。
到此,以上就是小编对于abb功能程序的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏