本篇目录:
!基于Simulink的控制系统建模与仿真
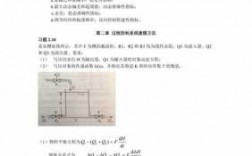
基于Simulink的控制系统建模与仿真例1强制阻尼二阶系统fxmFk考虑如图所示强制阻尼二阶系统。图中,小车所受外力为F,小车位移为x。设小车质量m=5,弹簧弹性系数k=2,阻尼系数f=1。
Simulink是MATLAB中的一种可视化仿真工具, 是一种基于MATLAB的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。
-图1")
在simulink的simulation-configuration parameters里面设置。默认是可变的(variable-step)自动步长的(auto).。如果要改变步长,可把variable-step改车fixed-step,step size(fundamental sample time)可自己来指定。
Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。那么如何使用matlab上建立simulink仿真呢?本文小编带你建立simulink仿真程序。
simulink中按极点配置设计控制规律怎么搭建
结合自动代码生成, Simulink 已经成为覆盖系统功能设计,仿真以及软件设计的最主要工具。 Simulink 中搭建的控制逻辑,也不仅仅用在仿真中,而是可以直接生成 C 代码,在编译之后用于电子控制器的实时控制。
打开Simulink模型窗口。在Simulink库浏览器中搜索C32模块,并将其拖放到模型窗口中。连接C32模块的输入和输出端口到其他模块或信号源。接着设置C32模块的参数,例如时钟频率、数据宽度。
-图2")
先运行MATLAB,因为只有启动了MATLAB才能进行动态仿真。选择工具栏的“主页”,然后选择并点击“Simulink 库”。打开了Simulink Library Browser。在菜单栏中选择“file”,然后选择“new”。
在库simulink-sources中有一个repeating sequence模块,可以再起parameter里面设置一些值,在不同的时间,输出不同的值。
simulink搭建数字逻辑关系式是,用Simulink中提供的逻辑运算符来搭建一个数字逻辑电路,根据输入信号.X和Y确定输出Z。
在Simulink中设置参数可以通过以下方式实现: 在模型中找到需要设置参数的模块,在模块上单击右键,选择“Block Parameters”(块参数)。
-图3")
怎么用simulink对增量式PID建模
方法:1,根据模糊规则完成FIS 文件,并送入工作空间。2,根据系统流程图搭建Simulink模型。3,将FIS文件与Simulink进行连接。
图2 Simulink仿真建模 3 仿真实验 在传统的PID 调节器中,参数的整定问题是控制面临的最主要的问题,控制系统的关键之处便是将Kp、Ti、Td三个参数的值最终确定下来。
D使用连续系统库模块里的Derivative模块 对照课本上的框图,就能构建出了 离散:simpowerSystems-Discrete Control Blocks里面,一个是PI,一个是PID 连续:Simulink Extras-Additional Linear里面。
先买本控制方面的书,了解PID控制原理 2,了解simulink的使用方法。用simulink来做PID控制实际很简单的。3,实际上simulink中有一个跟你很相似的关于水箱水位的控制模型例子。
于逐渐将系统参数像相对较优的方向调整,所以的到了一种较优的输出。
到此,以上就是小编对于simulink control design的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏